|
Der im Buch vorgestellte und verwendete Navilock-Empfänger NL-6002U enthält den GPS-Chip NEO-6P von ublox. Auf der Homepage von ublox findet sich allerdings eine "End-of-life notification" vom 12. Mai 2020. Das letzte Auslieferungsdatum für diesen Chip ist dort auf den 30. April 2021 festgelegt. Es ist damit davon auszugehen, dass auch der Navilock NL-6002U nicht mehr allzulange produziert werden kann. Laut Mitteilung von Navilock vom Juni 2021 befindet sich ein Empfänger mit dem ublox-Chip NEO-M8P bereits im Prototypenstatus und soll ab Ende 2021 verfügbar sein. Unabhängig davon war es sinnvoll, sich nach alternativen Empfängern umzusehen, welche ebenfalls die für unsere Zwecke benötigten Pseudoentfernungen ausgeben. Neben den Empfängern von ublox soll dies auch für Empfänger der Firma Trimble gelten. Da es sich hierbei jedoch um sehr hochpreisige Empfänger handelt, konnte dies bisher nicht überprüft werden. Von ublox gibt es allerdings (mindestens) zwei Nachfolgerchips, welche den Empfang von Rohdaten ermöglichen. Es handelt sich hierbei um die Chips NEO-M8P und ZED-F9P. Die Verwendung dieser beiden Chips unterscheidet sich von den im Buch gemachten Angaben. Die für uns wesentlichen Unterschiede und daraus folgenden Änderungen bei der Datenaufnahme werden nachfolgend dargestellt. |
| NEO-M8P-2 |
| Bisher hat Navilock keinen betriebsbereiten GPS-Empfänger mit diesem Chip im Angebot, so dass man auf alternative Lösungen ausweichen und etwas "basteln" muss. Die amerikanische Firma SparkFun stellt u.a. sogenannte Breakout-Boards mit verschiedenen GPS-Chips von ublox her. Ein Breakout-Board enthält elektronische Schaltungen auf Platinen, welche die winzigen Anschlüsse der Chips "aufbrechen", so dass man jeden Kontakt einzeln via Klemme abgreifen und nach Belieben auslesen/weiterverarbeiten kann. Die SparkFun-Boards werden in Deutschland beispielsweise von BerryBase vertrieben. |
|
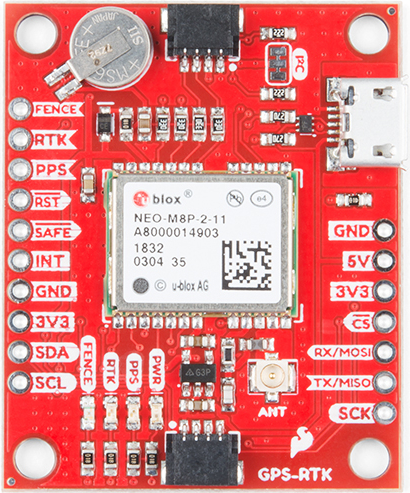
BreakoutBoard von SparkFun mit dem ublox NEO-M8P (Abb. mit freundl. Genehmigung von SparkFun) |
|
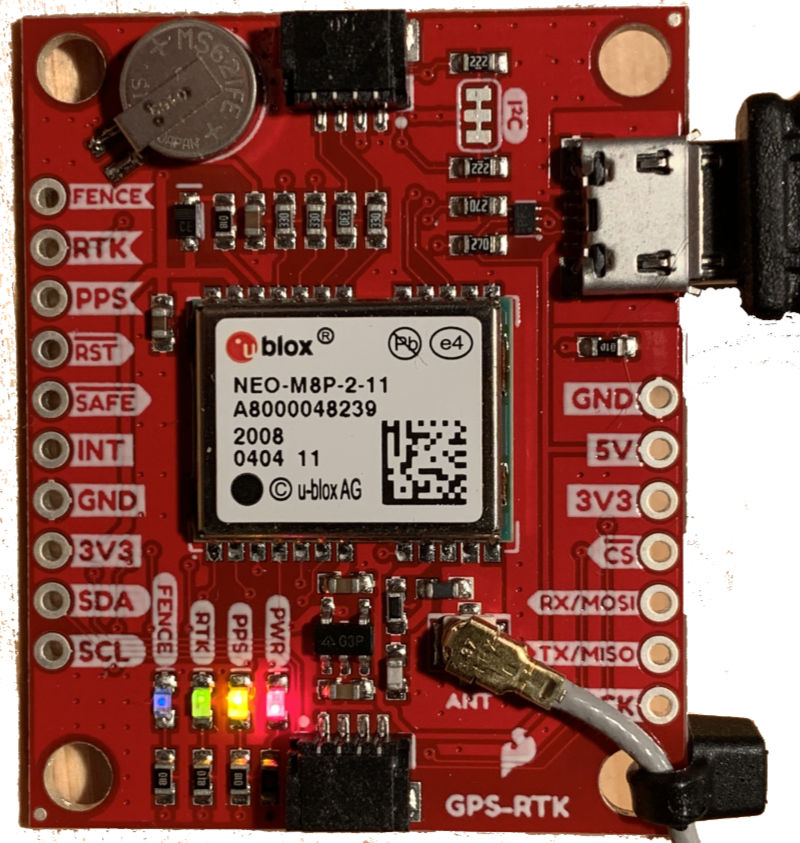
Die gesamte Platine ist 41 mm x 34 mm groß, sie stellt einen vollwertigen GPS-Empfänger dar. Rechts oben befindet sich ein Micro-USB-B-Anschluss zur Verbindung mit dem Computer, über diesen Anschluss erhält die Platine auch ihre Stromversorgung. Der winzige kreisrunde Kontakt unterhalb der rechten Ecke des Chips dient dem Antennenanschluss. Dabei handelt es sich um einen sogenannten U.FL-Steckkontakt, ein Standard für Miniatur-HF-Steckverbinder bis zu 6 GHz. Dieser empfindliche Kontakt ist ausschließlich für dauerhafte Verbindungen innerhalb elektronischer Geräte vorgesehen und für nur wenige Steckvorgänge spezifiziert. Da es ohnehin keine GPS-Antennen mit dem passenden Gegenstück gibt, benötigt man ein Adapterkabel, welches auf der einen Seite die passende U.FL-Buchse und auf der Gegenseite beispielsweise eine SMA-Buchse für den Anschluss des Antennenkabels aufweist. Beim Anstecken des Adapterkabels auf den U.FL-Kontakt der Platine muss man größte Sorgfalt walten lassen: Die Buchse muss genau zentrisch über dem Stecker platziert sein und exakt parallel eingeclipst werden. SparkFun stellt hierfür eine detaillierte Anleitung zur Verfügung! Es ist empfehlenswert, das Adapterkabel nach dem Anschluss vorsichtig mit einem Kabelbinder am benachbarten Befestigungsloch der Platine zu fixieren, um mögliche Krafteinwirkungen vom Steckkontakt fernzuhalten, |
 |
|
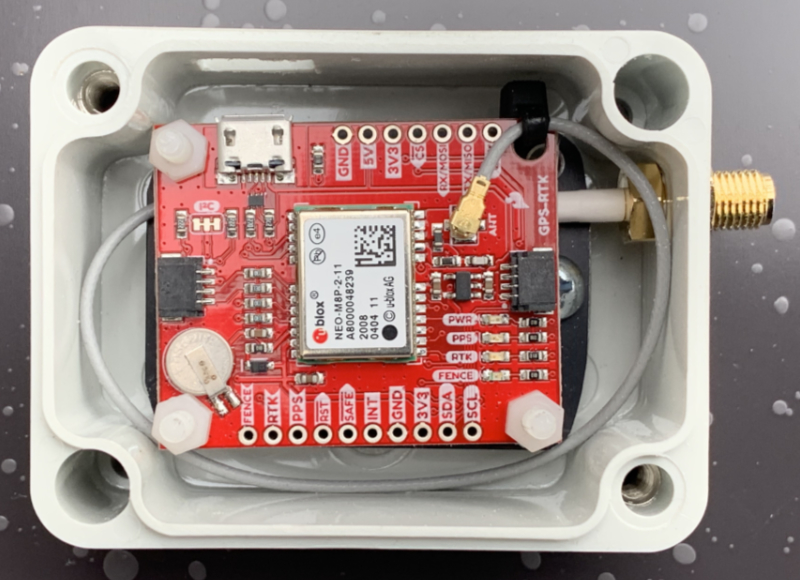
Weiter ist es sinnvoll, die Platine so in ein kleines Gehäuse einzubauen, dass der USB-Steckanschluss noch von außen erreichbar ist. Das andere Ende des U.FL–SMA–Adapterkabels mit der SMA-Buchse befestigt man ebenfalls am Gehäuse, so dass das eigentliche Antennenkabel dort von außen aufgeschraubt werden kann.
Das andere Ende des USB-Kabels mit dem üblichen USB-A-Stecker verbindet man mit dem Computer, startet u-center und stellt die Verbindung über den angebotenen COM-Port her. |
| Datenaufnahme |
|
Wie gewohnt interessiert uns nur der UBX-Pfad im "View"-Fenster. Wieder klicken wir auf UBX und selektieren mit der rechten Maustaste "Enable child messages". Dasselbe machen wir im Zweig RXM. Der NEO-M8P-Chip kann neben den Signalen von GPS-Satelliten auch noch diejenigen der Systeme Beidou und Glonass empfangen und dadurch hochpräzise Posiitonsbestimmungen durchführen. Da wir uns nur für die GPS-Signale interessieren, schalten wir im Datenpfad UBX–CFG–GNSS alle anderen Systeme aus, indem wir eventuell gesetzte Haken in der Spalte "enable" entfernen. |
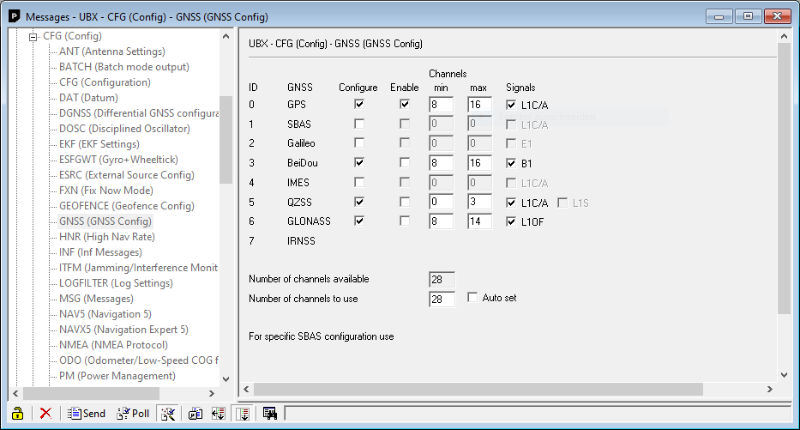 |
| Klicken auf die Schaltfläche "Send" überträgt die getroffene Wahl in den Empfänger. Um die Auswahl dort permanent zu speichern, so dass diese auch bein nächsten Einschalten noch gültig ist, muss man in den Pfad UBX–CFG–CFG wechseln, dort die Option"Save current configuration" wählen und nochmals auf die Schaltfläche "Send" klicken. |
|
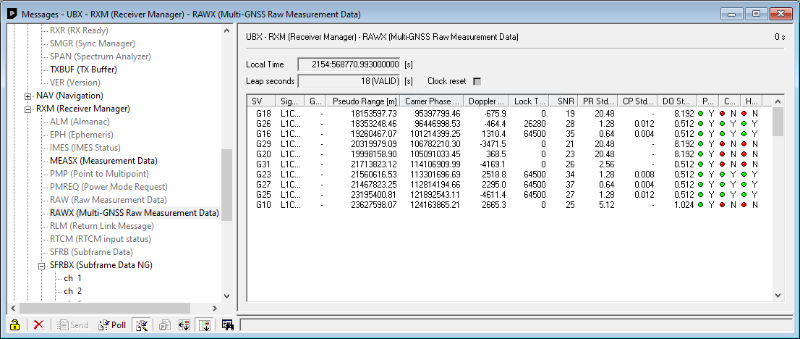
Im Datenpfad UBX–RXM–RAWX werden die Rohdaten der empfangenen Satelliten dargestellt, in der vierten Spalte die uns interessierenden Pseudoentfernungen. |
 |
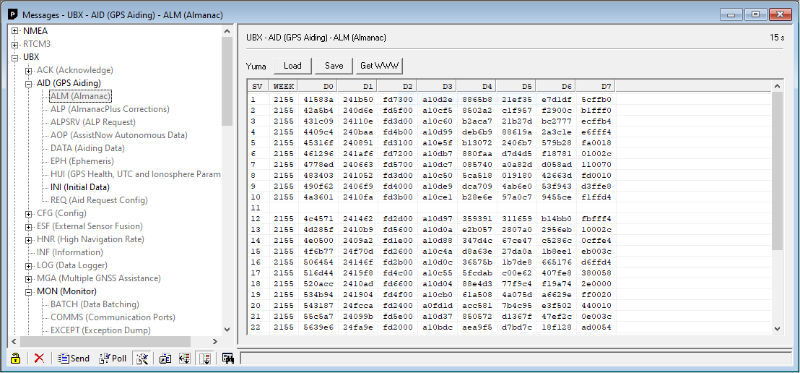
| Im Datenpfad UBX–AID–ALM ist der Almanach zu sehen, dieser kann von dort – wie im Buch beschrieben – über die Schaltfläche "Load" heruntergeladen werden. |
 |
| Im selben Zweig UBX–AID findet man unter dem Eintrag EPH die Ephemeriden der empfangenen Satelliten: |
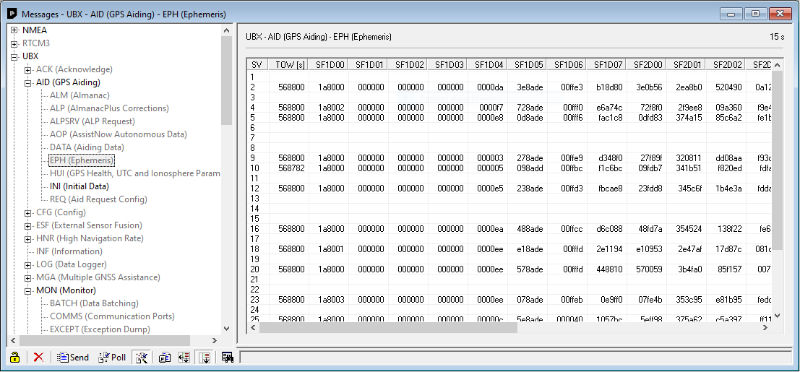 |
| Leider funktioniert die im Buch beschriebene Vorgehensweise zum Aufnehmen der Roh- und Ephemeridendaten nun nicht mehr, da die Ephemeriden nicht mehr im RXM-Zweig dargestellt werden! Man muss jetzt den Weg über das Fenster UBX–RXM–SFRBX gehen. In diesem Fenster wird der Inhalt der Subframes der Satellitennachrichten dargestellt und die Subframes 2 und 3 enthalten ja genau die Navigationsdaten des jeweiligen Satelliten. |
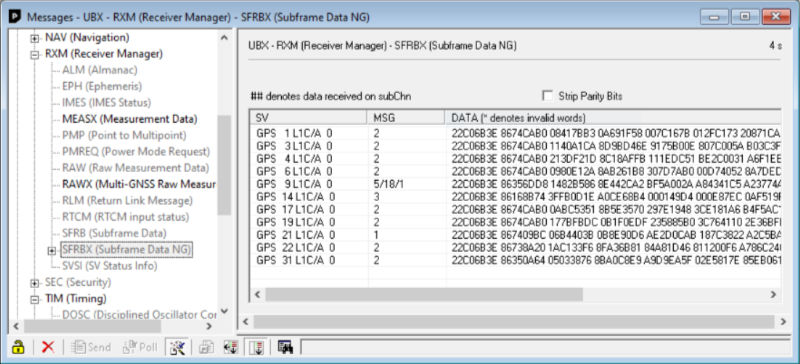 |
| Für die Datenaufnahme überprüft man zunächst, ob im Zweig UBX–RXM–RAWX genügend Satelliten empfangen werden und die Daten im Sekundenrythmus erneuert werden. Im Zweig UBX–RXM–SFRBX sollten ebenfalls genügend Satelliten dargestellt werden und dieses Fenster sollte alle sechs Sekunden ein Update erfahren. Sind diese beiden Voraussetzungen erfüllt, so startet man die Aufnahme und zeichnet den Datenstrom mindestens eine Minute lang auf. Diese längere Zeitspanne ist nötig, um auch genügend Ephemeridendaten zu erhalten. |
| Datenkonvertierung |
|
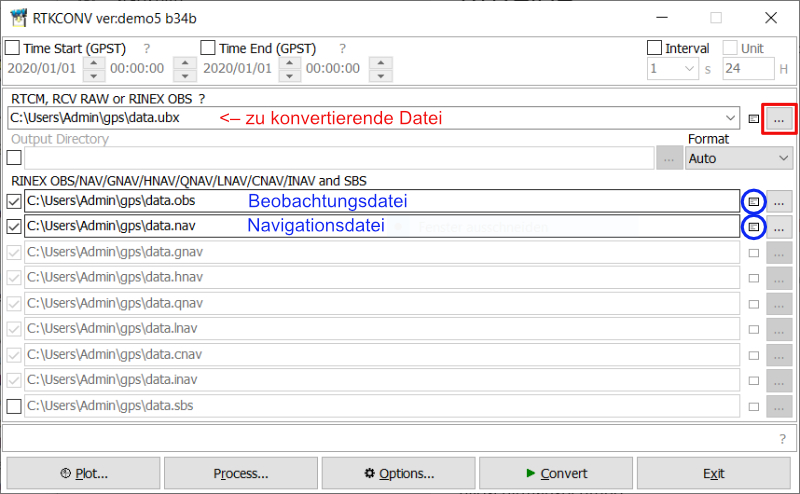
Bei der Konvertierung der ubx-Dartei wird eine weitere Änderung nötig: Das seither verwendete Programm teqc für die Konvertierung in RINEX-Dateien funktioniert nicht mehr für diese Darstellung der Ephemeriden. teqc kann zwar noch die Beobachtungsdatei erstellen, als Navigationsdatei wird allerdings immer nur eine leere Datei geliefert! Da teqc seit Anfang 2019 nicht mehr weiterentwickelt wird, scheidet diese Möglichkeit damit aus. Erfreulicher Weise gibt es inzwischen jedoch ein Windwos-Programm, welches die benötigte Konvertierung der mit dem NEO-M8P erzeugten ubx-Dateien sowohl für die Beobachtungs- als auch die Navigationsdatei durchführt. Dies ist das Programm RTKCONV, welches aus einer Sammlung mehrerer Routinen für die Bearbeitung von GPS-Daten – der RTKLIB – stammt. Leider funktioniert RTKCONV nicht für Dateien, die mit dem NEO-6P aufgezeichnet worden sind, dafür muss weiterhin das Programm teqc verwendet werden! Das gesamte Programmpaket kann über die Seite http://rtkexplorer.com bezogen werden. Diese Seite ist insgesamt eine gute Informationsquelle im Zusammenhang mit mit der GPS-Positonsbestimmung, so ist dort auch ein ausführliches Handbuch zu den Programmen der RTKLIB verfügbar. Hier soll es znächst jedoch nur um den Bezug des Programms RTKCONV gehen. Dazu wählt man auf der genannten Seite den Menüpunkt "Downloads / RTKLIB code" und klickt auf "Demo5 b34b binaries". Man erhält ein Verzeichnis mit allen Programmen, das ggf. erst noch entpackt werden muss. In diesem Verzeichnis befindet sich u.a. das Programm rtkconv.exe für Windows, welches man am Besten in das gps-Verzeichnis kopiert und von dort mit einem Doppelklick aufruft. Es erscheint das folgende Fenster: |
 |
|
In die oberste Eingabezeile schreibt man den Namen der zu konvertierenden Datei, wobei eine komfortable Auswahl durch Klicken auf die hier rot markierte Befehlsschaltfläche mit den drei Punkten geschehen kann. Nach der Auswahl werden sofort die Namen der Beobachtungs- und der Navigationsdatei in die entsprechenden Zeilen eingetragen. Diese Vorschläge kann man ebenfalls mit den jeweils rechts der Zeile befindlichen Schaltflächen mit den drei Punkten verändern. Dann muss man nur noch auf die Schaltfläche "Convert" klicken, um den Prozess zu starten. Nach dem Konvertierprozess können die Ergebnisse sofort durch Klicken auf die hier blau eingekreisten Schaltflächen zur Ansicht gebracht werden. Man wird anfangs feststellen, dass die Beobachtungsdatei problemlos erstellt wurde, die Navigationsdatei aber entweder leer geblieben ist oder aber nur ein Teil der in u-center angezeigten Ephemeriden übernommen wurde. Die Aufzeichnung der Ephemeridendaten dauert nun ganz offensichtlich deutlich länger als bei der im Buch beschriebenen Vorgehensweise. Beim aufmerksamen Betrachten des Fenster UBX–RXM–SFRBX wird deutlich, dass die Sekundenanzeige in der rechten oberen Ecke immer auf sechs zählt und dann der Fensterinhalt erneuert wird. Dies korrespondiert mit der Tatsache, dass die Übertragunsdauer eines jeden der fünf Unterrahmen genau sechs Sekunden dauert und das Akronym SFRBX steht für den Subframe-Inhalt der jeweiligen Satellitennachicht. Jeder Frame besteht aus 5 Subframs, die Nummer des empfangenen Subframes wird im SFRBX-Fenster in der zweiten, mit MSG gekennzeichneten Spalte angegeben. Beim Aufzeichnen der Daten in u-center sollte man den Durchlauf aller fünf Subframes und damit mindestens 30 Sekunden – besser eine ganze Minute – abwarten, bevor man die Aufnahme beendet. Am besten konvertiert man die aufgenommenen Daten umgehend mit RTKCONV und überprüft, ob die Ephemeriden aller empfangenen Satelliten vollständig in der Navigationsdatei vorhanden sind. Dem Nachteil, dass nun recht lange Beobachtungsdaten mit über 30 Aufzeichnungszeitpunkten entstehen, kann man begegnen, indem diese RINEX-Beobachtungsdaten in einem Editor exakt auf nur wenige Zeitpunkte gekürzt werden. Damit kann die Verarbeitungsgeschwindigkeit beim Einlesen der Beobachtungsdatei in Maxima signifikant verkürzt werden! |
| Datenauswertung |
| Da RTKCONV die RINEX-Dateien in einem etwas anderen Format darstellt, müssen die Maxima-Routinen zum Einlesen der RINEX-Dateien angepasst werden. Die hierfür notwendigen Änderungen sind unter dem Menüpunkt Anpassungen in Maxima beschrieben. |
| ZED-F9P |
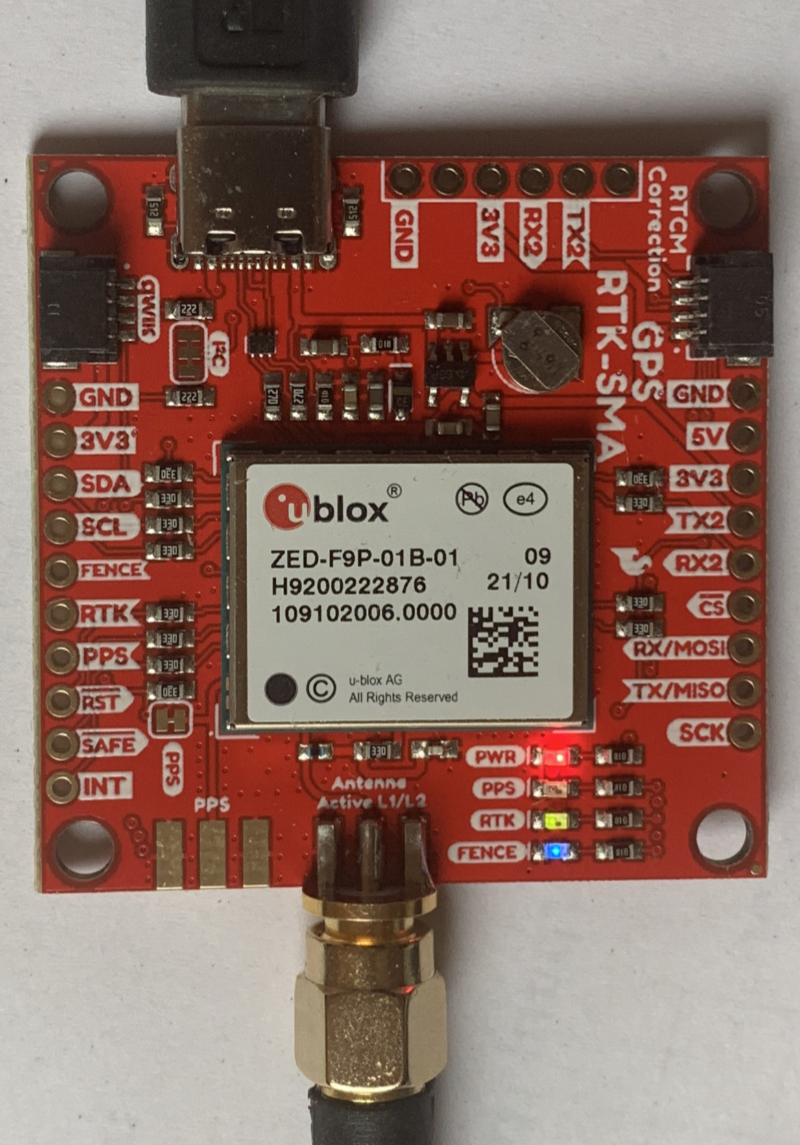
| Ein weiterer Chip aus dem Haus ublox, welcher Rohdaten liefert, ist der ZED-F9P. SparkFun hat ein BreakoutBoard mit diesem Chip unter der Bestellnummer GPS-16481 im Angebot, das in Deutschland u.a. ebenfalls von der Firma BerryBase vertrieben wird. Chip und Platine sind etwas größer als beim NEO-8MP, die Platine hat die Maße 43.5 mm x 43.2 mm |
|
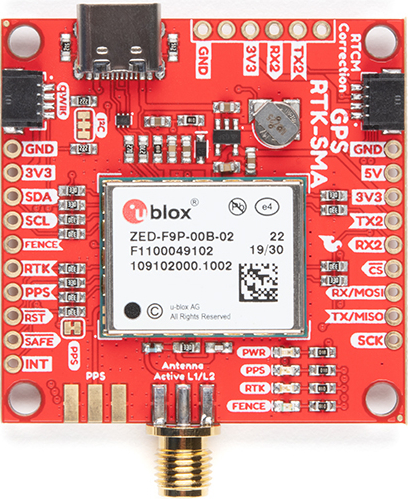
BreakoutBoard von SparkFun mit dem ublox ZED-F9P (Abb. mit freundl. Genehmigung von SparkFun) |
|
Dieses BreakoutBoard ist zwar geringfügig teurer als das oben vorgestellte, auf der anderen Seite hat es bereits einen SMA-Anschluss für die GPS-Antenne, so dass die Anschaffung eines entsprechenden Adapterkabels und dessen nicht unkritischer Anschluss entfallen. Natürlich ist auch der enthaltene Chip deutlich leistungsfähiger, dies spielt allerdings für unsere Zwecke keine Rolle, da wir ohnehin nur die Pseudoentfernungen auswerten. Angemerkt werden muss, dass dieses Board zum Anschluss an den Laptop über eine USB Typ-C-Anschlussmöglichkeit verfügt, so dass ein entsprechendes Adapterkabel benötigt wird. |
 |
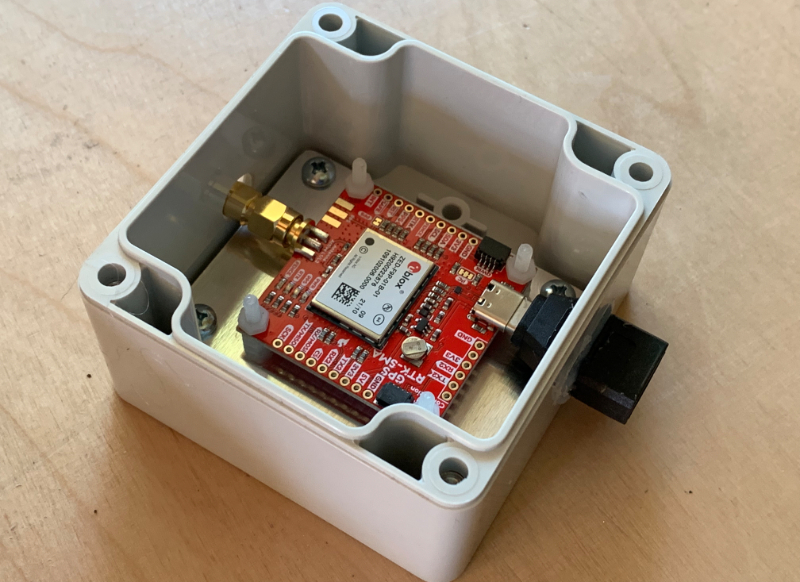
| Um mechanische Beanspruchungen der Platine zu vermeiden, empfiehlt sich wiederum der Einbau in ein Gehäuse. Im unten gezeigten Beispiel wurde der SMA-Antennenanschluss durch einen Adapeter aus dem Gehäuse geführt und der USB-C-Anschluss ebenfalls. Der USB-Adapter wurde mit dem Gehäuse verklebt und bietet an seinem anderen Ende eine Anschlussmöglichkeit für ein übliches USB-A-Kabel. |
 |
|
Da der ZED-F9P neben dem GPS auch noch Galileo-, BeiDou und Glonass-Satelliten empfangen kann, empfiehlt es sich, diese Systeme – wie bereits weiter oben beschrieben – vor der Datenaufnahme wie beim NEO-M8P über u-center ebenfalls abzuschalten. |
| Datenaufnahme |
| Die Aufnahme der Beobachtungs- und Navigationsdateien geschieht genau wie bereits oben beim NEO-M8P beschrieben.
Bei der Verwendung des ZED-F9P-Chips sind allerdings auch Unterschiede zu beachten. So wird der Almanach leider nicht im Datenpfad UBX–AID–ALM dargestellt. u-center bietet im zugehörigen Fenster zwar die Möglichkeit, den Almanach aus dem WWW zu beziehen, allerdings erscheint bei einem entsprehenden Versuch die Fehlermeldung, dass es beim Lesen der Datei zu einem Fehler gekommen ist. Dieses Problem kann relativ einfach umgangen werden: Man klickt auf die Schaltfläche "Get WWW", wählt als Yuma-Server den Eintrag http://www.celestrak.com/GPS/almanac/Yuma/almanac.yuma.txt und klickt dann auf die Schaltfläche "Test". Damit wird der Browser geöffnet und es erscheint die zugehörige Seite mit dem aktuell gültigen Almanach. Dieser kann direkt aus dem Browserfenster heraus lokal gespeichert werden. |